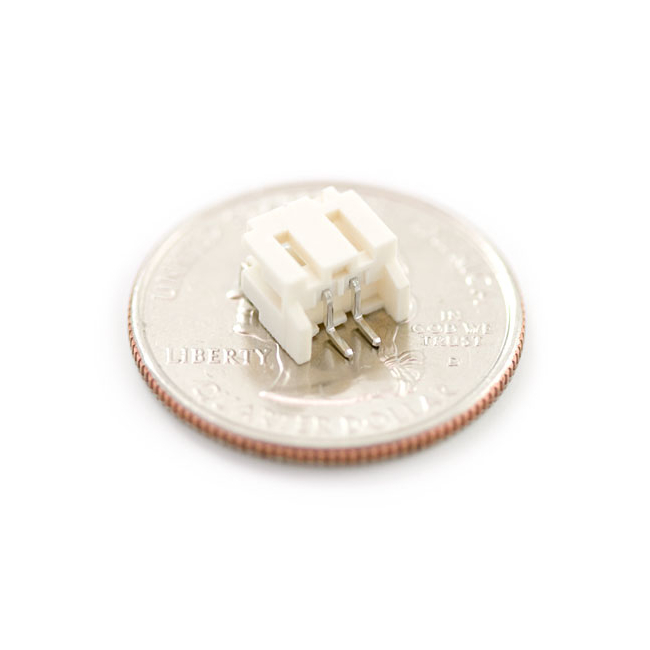
Two pin, compact surface mount connector. We really like the solid locking feeling and high current rating on these small connectors. We use these all the time as battery connectors.
Two pin, compact surface mount connector. We really like the solid locking feeling and high current rating on these small connectors. We use these all the time as battery connectors.