Currency
|

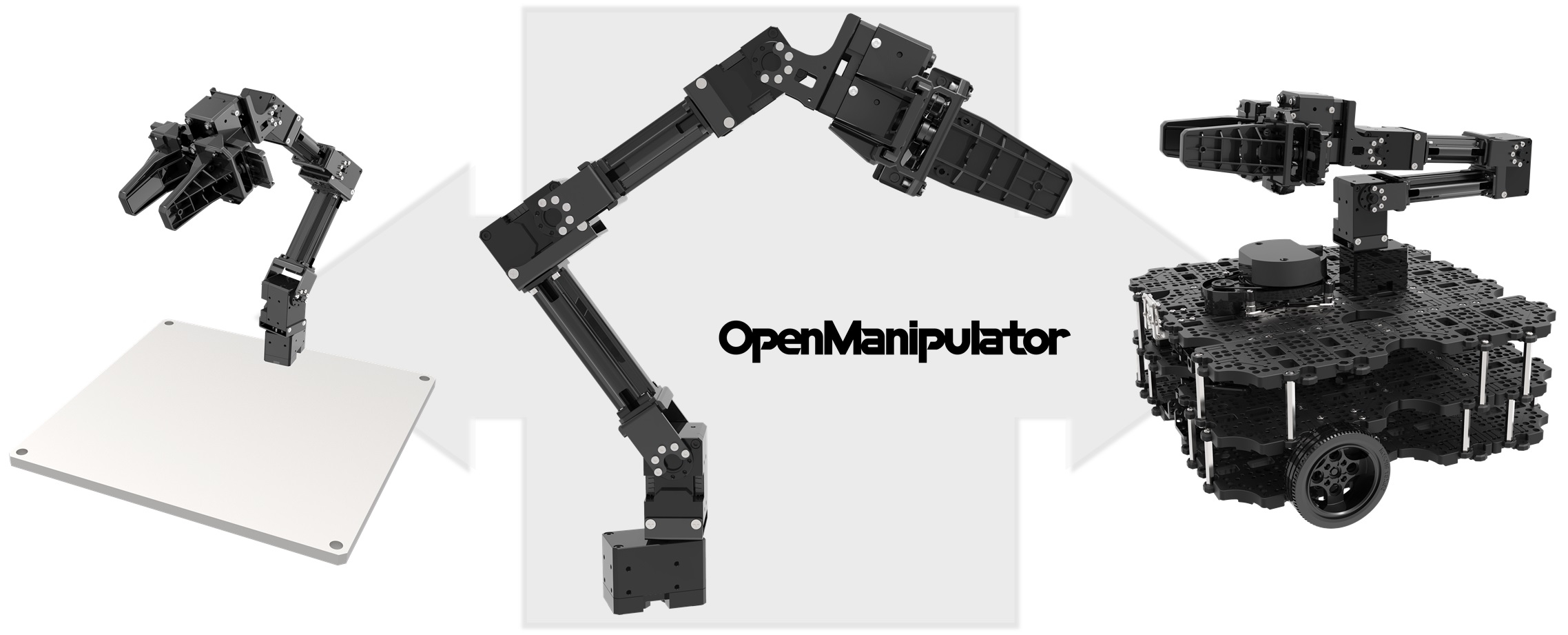
The OpenManipulator is oriented towards Open Hardware. Most of the components except for some frames are uploaded as STL files that can be 3d printing. This allows users to modify the length of the link and the design of the robot to suit the intended use. The open manipulator also uses the Dynamixel X series used in TurtleBot 3. Dynamixel has a modular form and adopts daisy chain method. This allows users to easily change and add joints for some torque and degree of freedom they need. Taking advantage of these advantages, we are planning a total of seven different types (For example, Chain, SCARA, Link, Planar, Delta, Stewart and Linear) of OpenManipulator.
OpenManipulator are based on ROS and OpenSource. ROS official hardware platform ,TurtleBot series has been supporting ‘TurtleBot Arm’. The OpenManipulator has full hardware compatibility with TurtleBot3, and allows users to control it more easily by linking with the MoveIT! package. Even if you do not have a real robot, you can control the robot in the Gazebo simulator.
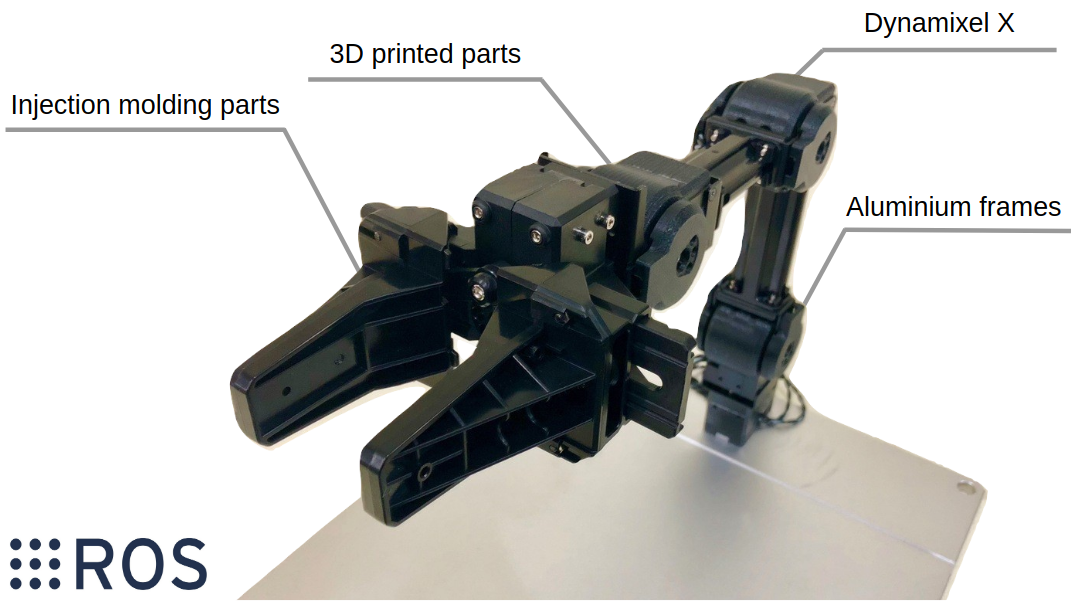
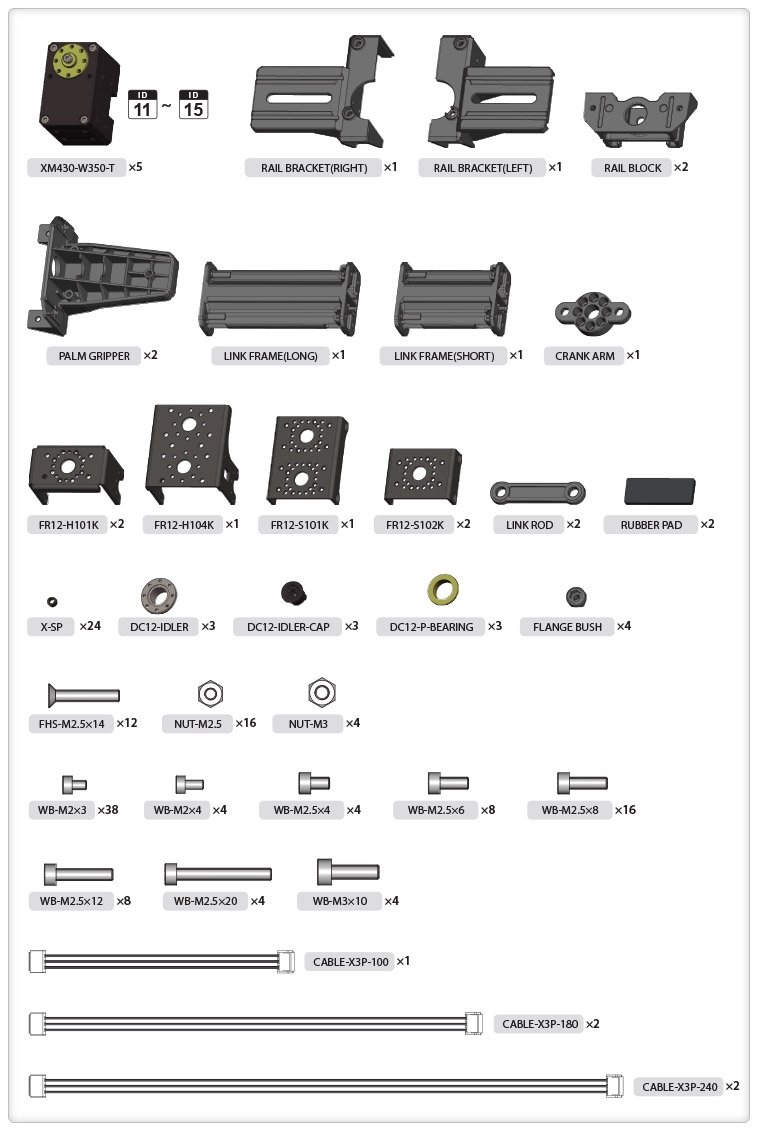
OpenManipulator is composed by Dynamixel X series and 3D printing parts. Dynamixel has a modular form and adopts daisy chain method. This allows users to easily change and add joints for some torque and degree of freedom they need. Moreover, growing 3D printing technology makes anyone can make anything they want with low cost and rapid time. We suggest some examples of links and safety parts. Taking advantage of these advantages, we are planning a total of seven different types of OpenManipulator.
The OpenManipulator can also be controlled via OpenCR (Open-source Control module for ROS), the control board of TurtleBot3. OpenCR’s computing power and real-time control are used to support forward, inverse kinematics, and profile control examples. In addition, OpenCR can interoperate with many functions provided by ROS through message communication with ROS, which will evolve into ROS 2.0 in the future.
| Actuator | Dynamixel XM430-W350-T |
| Input Voltage | 12V |
| DOF | 5 (4 DOF + 1 DOF Gripper) |
| Payload | 500g |
| Speed(Joint) | 46 RPM |
| Weight | 0.70 (1.54) kg (lb) |
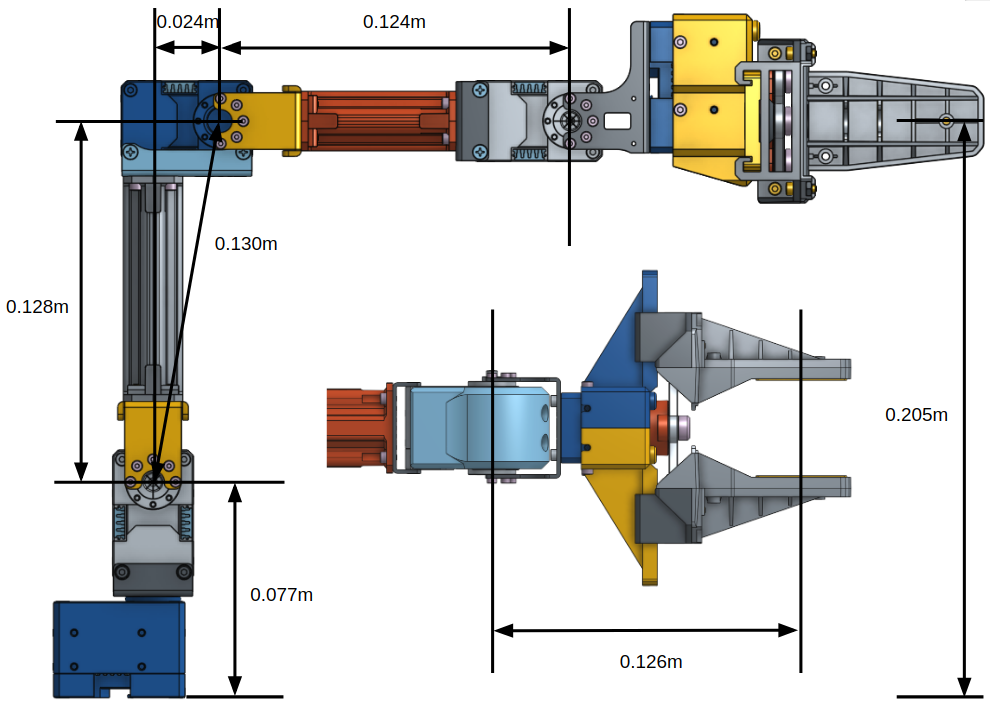
| Reach | 380 (14.9) mm (in) |
| Gripper Stroke | 20~75 (0.79~2.95) mm (in) |
| Communication | TTL (Level Multidrop BUS) |
| Software | ROS, Dynamixel SDK, Arduino, Processing |
| Main Controller | PC, OpenCR |
| Power Supply | SMPS 12V 5A |
| Controller | OpenCR or PC |
| Interface | U2D2 |
| Etc. | Base Plate-02 |
Compatible with TB3 controller and power.
The assembly Manuel is not included, but you can download the pdf file on online for free. (Refer to below link)
The necessary idler set (HN11-I101 Set) is included in case you would like to use DYNAMIXEL XL430 as a hinge. (* Need to purchase DYNAMIXEL XL430 separately)
| Manufacturer | Robotis |
|---|