Currency
|
LEO mobile robot is an intelligent mobile platform for teaching, research and competition among university users. It is a revolutionary product.LEO is of moderate size and can be flexibly deployed in the robot teaching laboratory.
It can be easily integrated with a variety of robotic arms and sensors, and has good scalability.It supports the open source ROS robot operating system and provides a range of resources for ROS learning.

The simple and smooth appearance, rigorous design idea, exquisite production process, reliable software configuration and cases close to practical applications engender the concept of "productization" of LEO mobile robot.

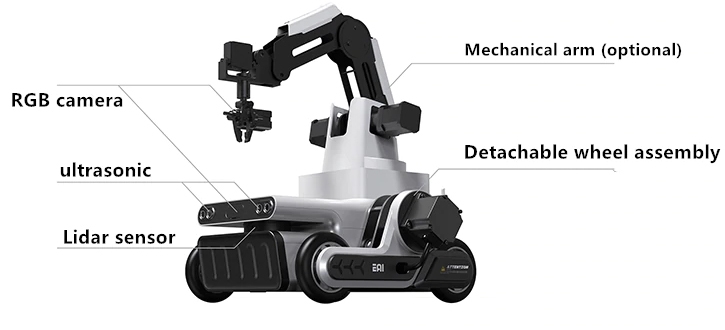
LEO mobile robot adhering to the modular design concept, the whole machine is divided into wheel group, control host, depth camera, mechanical arm (optional) several major functional modules, easy to disassemble and install, simple maintenance. The operation between each module is relatively independent, which maximizes the orderly operation of the whole machine.When one of the modules fails, it can be replaced simply instead of disassembling the whole machine to reduce maintenance cost and save time.
The overall size Of LEO mobile robot is 220*380*150 (mm). It can be conveniently deployed in various laboratories to save space and reduce the cost of laboratory construction while it is equipped with various functional modules that the mobile robot should have.
LEO mobile robot is equipped with high-quality air packing box, which can not only provide reliable protection for LEO, but also make it convenient and easy to carry, especially suitable for frequent moving scenarios such as going out to participate in competitions.


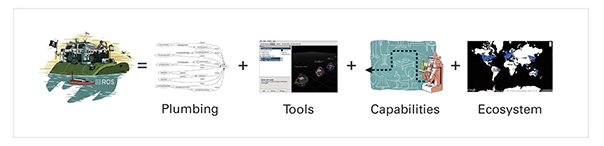
LEO mobile robot supports ROS robot operating system, which is open source and free, with a large user base and abundant learning resources-lt provides a framework and tool for robot program control and has gradually developed into a DE facto standard for robot software development and application.
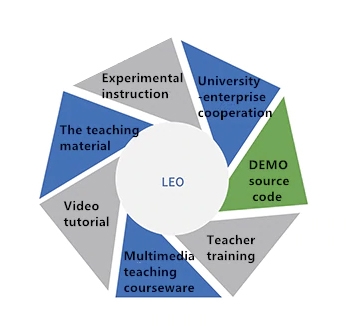
LEO mobile robot is an important part Of the "robot teaching laboratory program". It's equipped with complete teaching materials and services, including the following:
Based on the experimental instruction book of LEO mobile robot and related teaching materials
Electronic materials, such as video tutorials, multimedia teaching courseware, etc
The DEMO source code Teacher training based on ROS knowledge and ROS teaching



| Drive methods | Differential control |
| Drive wheel | 4 inch rubber wheel |
| Main structural materials | Sheet metal, ABS |
| Dead weight | About 10kg |
| Processor | INTEL I5 |
| RAM | DDR3 4G |
| ROM | 128G SSD(Solid state disk) |
| Lidar | EAI G1 high-precision lidar |
| Motor | Brushless DC motor |
| Obstacle avoidance sensor | Ultrasonic module*2 |
| IMU module | MEMS gyroscope, 3-axis accelerometer |
| RGB camera |
|
| Depth RGB-D camera | *1(Optional) |
| robot arm | DOBOT Magician robot arm (Optional) |
| Battery type | Power lithium battery |
| Battery capacity | 11.2Ah/24V |
| Charging time | About 4.5 hours |
| Charging voltage | 29.4V |
| Battery life | About 8 hours |
| Climbing capability | 12° Vertical obstacle |
| crossing ability | 18mm |
| Motion speed | 1m/s |
| APP control | Support |
| RosStudio IDE control | Support |
| Remote login SSH control | Support |
| Remote controller control | Support |
| Charging temperature | 0~45ºC |
| Discharging temperature | -10~60ºC |
| Working moisture | 30%~70% |
| Power port | 12V |
| Hardware port | LAN*1, WAN*1, VGA*1 USB3.0*2、USB2.0*1 |
| All algorithms are open source | Support |
| Android secondary development DEMO | Support |
| Manufacturer | YDLIDAR |
|---|

