Currency
|
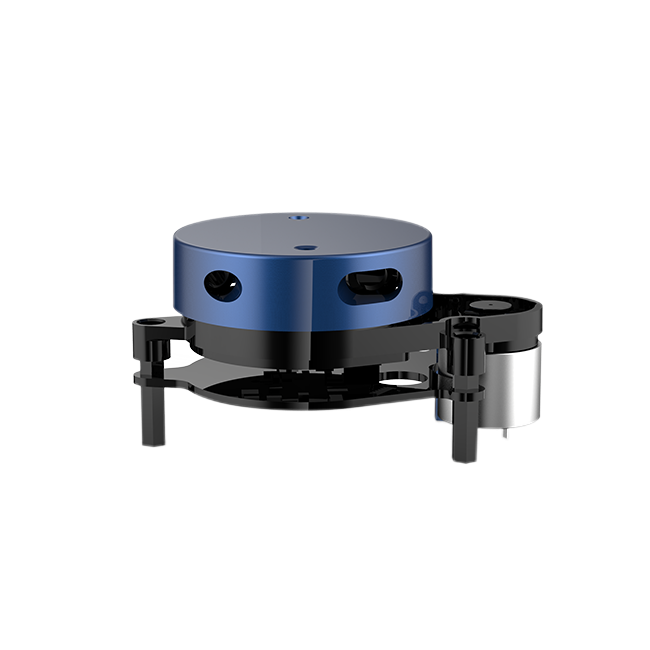
YDLIDAR X2 is a 360-degree two-dimensional rangefinder (hereinafter referred to as X2) developed by YDLIDAR team.

YDLIDAR X2 is a 360-degree two-dimensional rangefinder (hereinafter referred to as X2) developed by YDLIDAR team. Based on the principle of triangulation, it is equipped with related optics, electricity, and algorithm design to achieve high-frequency and high-precision distance measurement. The mechanical structure rotates 360 degrees to continuously output the angle information as well as the point cloud data of the scanning environment while ranging.
| Range Frequency | Scan Frequency | Range Distance | Scan Angle | Angle Resolution | Size |
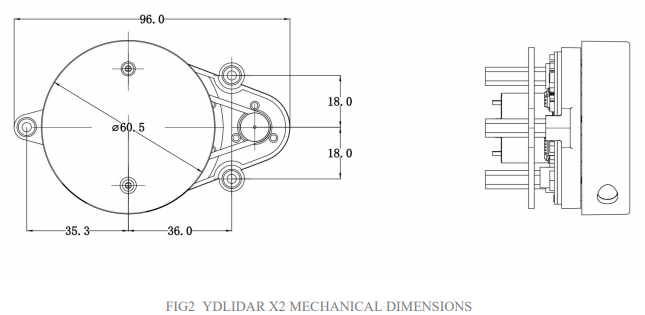
| 3000Hz | 7Hz | 0.10-8m | 360° | 0.82°-0.86° | Φ60*47*96mm |



Product Parameter
| Item | Min | Typical | Max | Unit | Remarks |
| Ranging frequency | - | 3000 | - | Hz | 3000 times per second |
| Motor frequency | - | 7 | - | Hz | PWM or Voltage Regulation |
| Ranging distance | 0.10 | - | >8 | m | Indoor |
| Scanning angle | - | 0~360 | - | Deg | - |
| Absolute error | - | 2 | - | cm | Distance≤0.5m |
| Relative error | - | 1.5% | - | - | 0.5m |
| - | 2.0% | - | - | 6m | |
| Angle resolution | 0.82 | 0.84 | 0.86 | Deg | Scanning frequency=7 |
Note 1: The measurement range and relative accuracy above are the factory inspection standard value;
Note 2: The relative error value indicates the accuracy of the Lidar measurement. Relative error = (Measuring distance - Actual distance) / Actual distance * 100%. Please avoid using Lidar under high-temperature, high-low temperature or strong vibration situation, which might cause a 3% relative error
Electrical Parameter
| Item | Min | Typical | Max | Unit | Unit |
| Supply voltage | 4.8 | 5 | 5.2 | V | Excessive voltage might damage the Lidar while low affect normal performance |
| Voltage ripple | 0 | 50 | 100 | mV | Excessive ripple affect normal performance |
| Starting current | 300 | 400 | 500 | mV | Higher current required at start-up |
| Working current | 200 | 350 | 380 | mV | Normal working |
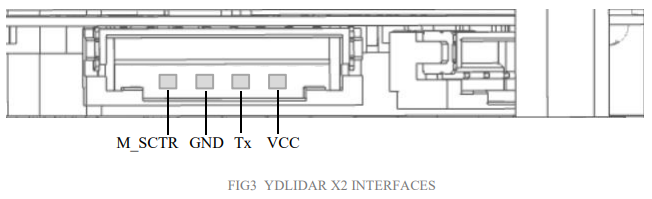
Interface Definition






| Manufacturer | YDLIDAR |
|---|