Currency
|
■ Basic Features
• Improved Torque, Compact Design
• Enhanced Durability and Expandability
• Hollow Back Case Minimizes Cable Stress (3-Way Wiring)
• Frames Directly Screwed onto the Case (No Nuts Needed)
• Improved Aluminum Case Heat Sink
• 6 Operating Modes
• Current-Based Torque Control (4096 steps, 2.69mA/step)
• Profile Control for Smooth Motion Planning
• Trajectory Data and Moving Status (In-Position, Following Error, etc.)
• Energy Efficient (Standby Current Reduced from 100mA to 40mA)
• 28.4% reduced volume compared to the MX-106
■ Package Contents
|
Description |
Quantity |
|
|
DYNAMIXEL |
XM540-W150-R |
1 |
|
HORN |
HN13-N101 |
1 |
|
WASHER |
Teflon Washer (for Horn Assembly) |
1 |
|
CABLE |
Robot Cable-X4P 180mm |
1 |
|
Robot Cable-X4P (Convertible) 180mm |
1 |
|
|
3P Sync Cable 160MM |
1 |
|
|
BOLT/NUT |
Wrench Bolt (WB M2.5*5) |
16 |
|
Wrench Bolt (WB M2.5*4) |
10 |
|
|
Wrench Bolt (WB M3*8) |
1 |
|
|
ETC |
Spacer Ring |
8 |
■ H/W Specifications
|
Model Name |
XM540-W150-R |
||
|
Weight (g) |
165 |
||
|
Dimensions (mm) |
33.5 x 58.5 x 44 |
||
|
Gear Ratio |
152.3 : 1 |
||
|
Operation Voltage (V) |
11.1 |
12.0 |
14.8 |
|
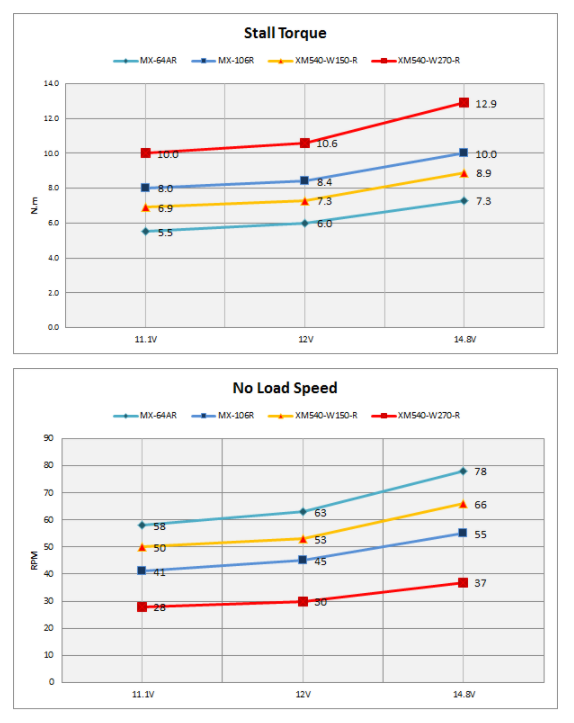
Stall Torque (N.m) |
6.9 |
7.3 |
8.9 |
|
Stall Current (A) |
4.2 |
4.4 |
5.5 |
|
No Load Speed (RPM) |
50 |
53 |
66 |
|
|
|||
|
MCU |
ST CORTEX-M3 (STM32F103C8 @ 72MHZ,32BIT) |
||
|
Position Sensor |
Contactless absolute encoder (12BIT,360°) by AMS |
||
|
Motor |
Coreless |
||
|
Resolution |
0.088° x 4,096 step |
||
|
Operating Range |
Current Control Mode : Endless turn |
||
|
Input Voltage (V) |
10~14.8V (Recommended voltage : 12V) |
||
|
Operating Temperature |
-5°C ~ 80°C |
||
|
Communication Signal |
Digital Packet |
||
|
Protocol |
RS485 Asynchronous Serial Communication (8bit,1stop, No Parity |
||
|
Link (physical) |
RS485 Multi Drop Bus |
||
|
ID |
253 ID (0~252) |
||
|
Baud Rate |
9600 bps ~ 4.5 Mbps |
||
|
Feedback |
Position, Velocity, Current, Realtime tick, Trajectory, Temperature, Input Voltage, etc. |
||
|
Material |
Case : Metal Body(Front, Middle) Engineering Plastic Body(Back) Gear : Full Metal |
||
|
Standby current (mA) |
40 |
||
■ Default Settings
ID : 1
Baud Rate : 57600bps
*Please make necessary modifications to ID, baud rate, etc. after purchase.
■ Hyperlinks
Frame, Horn, Bearing Compatible Chart : Click Here
Controller Compatibility Chart : Click Here
Download Drawing : Click Here
Dynamixel SDK : Click Here
OpenCM IDE : Click Here
Software RoboPlus (R+) : Click Here
Link to e-Manual : Click Here
■ Caution
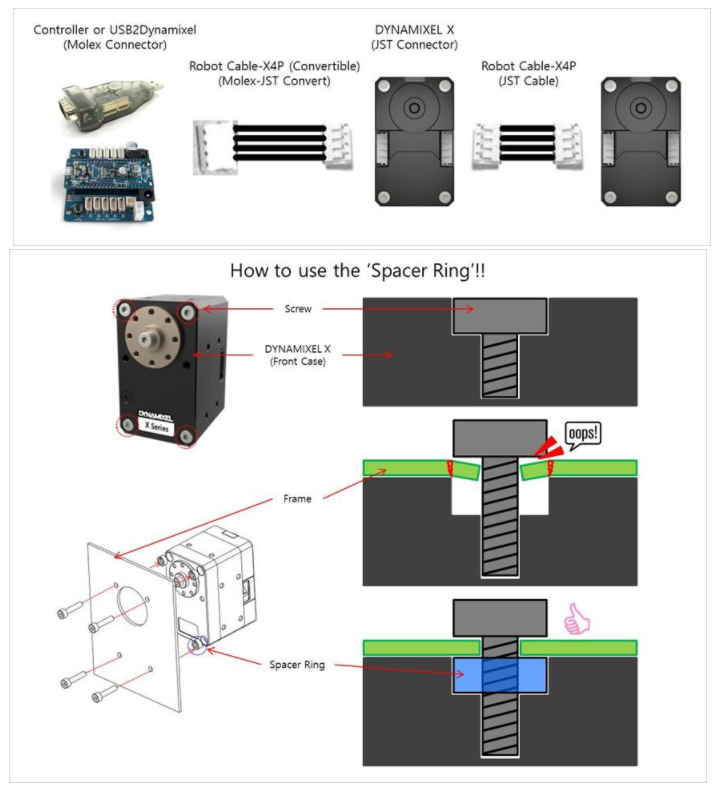
The DYNAMIXEL X-Series adopted a new gold-plated JST connector for secure and reliable communication.
For more information, please see the [DYNAMIXEL Connector Standard] page on the e-Manual.
To control DYNAMIXEL X-Series actuators via OpenCM or USB2Dynamixel, please use the JST-Molex Convertible Cable enclosed in the package.
However, the Molex-JST convertible cable is NOT included in the XL430 model.
Please purchase a convertible cable when using a controller and interface that supports the JST connector.
|
Controller / Interface Board |
Cable |
Dynamixel X |
||
|
Model |
Supports Connectors : |
Supports Connectors : |
Communication |
|
|
OpenCM+485 Expansion Board |
Molex (3P, 4P) |
Robot Cable-X3P 180mm (Convertible) |
JST-3P |
TTL |
|
USB2Dynamixel |
||||
|
OpenCR1.0 |
JST (3P, 4P) |
Robot Cable -X3P (by length) |
||
|
U2D2 |
||||
|
OpenCM+485 Expansion Board |
Molex (3P, 4P) |
Robot Cable -X4P 180mm (Convertible) |
JST-4P |
RS-485 |
|
USB2Dynamixel |
||||
|
OpenCR1.0 |
JST (3P, 4P) |
Robot Cable -X4P (by length) |
||
|
U2D2 |
||||
| Manufacturer | Robotis |
|---|



