The store will not work correctly when cookies are disabled.
JavaScript seems to be disabled in your browser.
For the best experience on our site, be sure to turn on Javascript in your browser.
Dynamixel XH430-W350-R
ROBOTIS DREAM Ⅱ Level 1 Kit
ROBOTIS Hand RH-P12-RN
Multi-functional robot hand with 2 fingers powered by 10W DC motor.
Passive Joints enable adaptive gripping for various shapes of objects.
Detachable finger tips can be easily replaced with customized finger tips.
Features
1-DOF Two-Finger Hand
Multi-functional robot hand witd 2 fingers powered by 10W DC motor.
Adaptive Gripping Design
Passive joints enable adaptive gripping for various shapes of objects.
Current Control (Force Control)
Torque control and current-based position control make it possible to pick up objects of various materials.
Light Weight & High Power
A 5kg high payload is delivered from a 500g light weighted robot hand.
Detachable Finger Tips
Detachable finger tips can be easily replaced witd customized finger tips.
Intuitive and Simple Mounting
tde robot hand can be quickly mounted on a ROBOTIS Manipulator. Simplified design enables easy mounting on custom applications.
Dynamixel 2.0 Protocol
tde robot hand supports DYNAMIXEL 2.0 protocol for easy control. Power and communication are connected via DYNAMIXEL BUS.
Package Components
RH-P12-RN
1 (Assembled Product)
FRP42-A110K
1
WB M3x8
20
Robot Cable-X4P 180mm
1
Robot Cable-X4P 180mm (Convertible)
1
Specifications
MCU
ST CORTEX-M4 (STM32F405 @ 168Mhz, 32bit)
Position Sensor
Contactless Absolute Encoder (12bit, 360°)
Motor
Coreless
Baud Rate
9,600 bps ~ 10.5 Mbps
Control Algoritdm
PID Control
Degree of Precision
0.088°
Operating Mode
Current Control Mode / Current based Position Control Mode
Weight
500g
Stroke
0-106mm
Gear Ratio
1181 : 1
Maximum Gripping Force
170N
Recommended Payload
5kg
Operating Temperature
-5°C ~ 55°C
Nominal Voltage
24V
Command Signal
Digital Packet
Protocol Type
RS485 Asynchronous Serial Communication (8bit, 1stop, No Parity)
Physical Connection
RS485 Multidrop BUS
ID
0 ~ 252
Feedback
Position, Velocity, Current, Temperature, Input Voltage, etc
Material
Full Metal Gear, Metal Body
Standby Current
30mA
Factory Default Settings
ID: 1 / Baud Rate: 57600bps
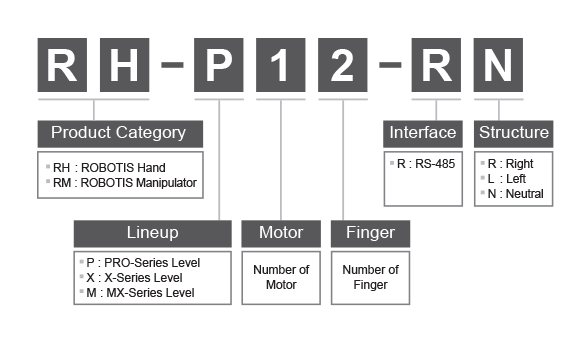
Model Numbering
Link
More Information
Manufacturer
Robotis