ROBOTIS THORMANG3. THOR (Tactical Hazardous Operations Robot) is an affordable, full size humanoid robot platform with advanced computational power, sophisticated sensors, high payload capacity, and dynamic motion abilities to enable many exciting researches and educational activities
THOR (Tactical Hazardous Operations Robot) is an affordable, full size humanoid robot platform with advanced computational power, sophisticated sensors, high payload capacity, and dynamic motion abilities to enable many exciting researches and educational activities
Features
Stable Walking with Human-Friendly Scale
Mission Capability using Adaptive Gripper
Powerful Dual PC-level Computing with Intel NUC
Various Sensing with Force/Torque Sensor, LIDAR/IMU/Camera
Full ROS Support with 3D CAD data and Open-Source SDK
DYNAMIXEL PRO based Modular Design with Full Metal Body
Best for SLAM, Locomotion, Manipulation and HRI Research
Specifications
Weight
42 kg
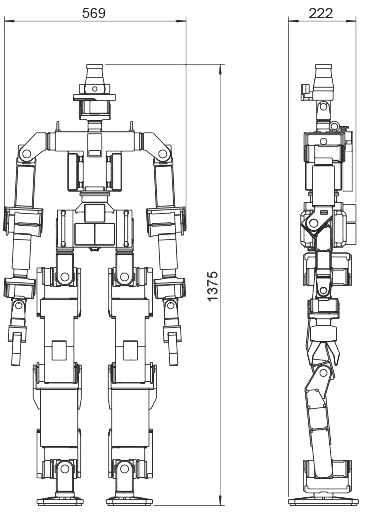
Height
137.5 cm
Controller (PC)
Intel® NUC with Intel® Core™ i5 Processor
Sensors
1 x Logitech C920 HD Camera 1 x Intel Realsense 1 x Hokuyo UTM-30LX-EW 2 x F/T Sensor: Ati Mini58-SI-2800-120 1 x IMU : MIcroStrain 3DM-GX4-25
Actuator
DYNAMIXEL PRO H-Series
DOF
Head: 2DOF Arms: 7DOF x 2 Waist: 1DOF Legs: 6 DOF x 2 (gripper x2)
Battery
LiPo 22.2v 22000mA & 18.5v 11000mA
Control Environment
OS: Linux Ubuntu LTS (64 bit) SW: ROS / GNY C++ Library: Motor Control, Manipulation, Head Control, Walking Engine, Sensor control