Currency
|
Data & Training
Multiple proprietary humanoid embodiments, featuring in-house actuators, gearboxes, encoders, and sensors.
A unified platform for the complete data pipeline: acquisition, processing, labeling, review, and data asset management.
Enables distributed training, custom model development, and seamless deployment, with full support for all major open-source frameworks.
Robot DOF
Arm DOF
Waist DOF
Column DOF
Base DOF
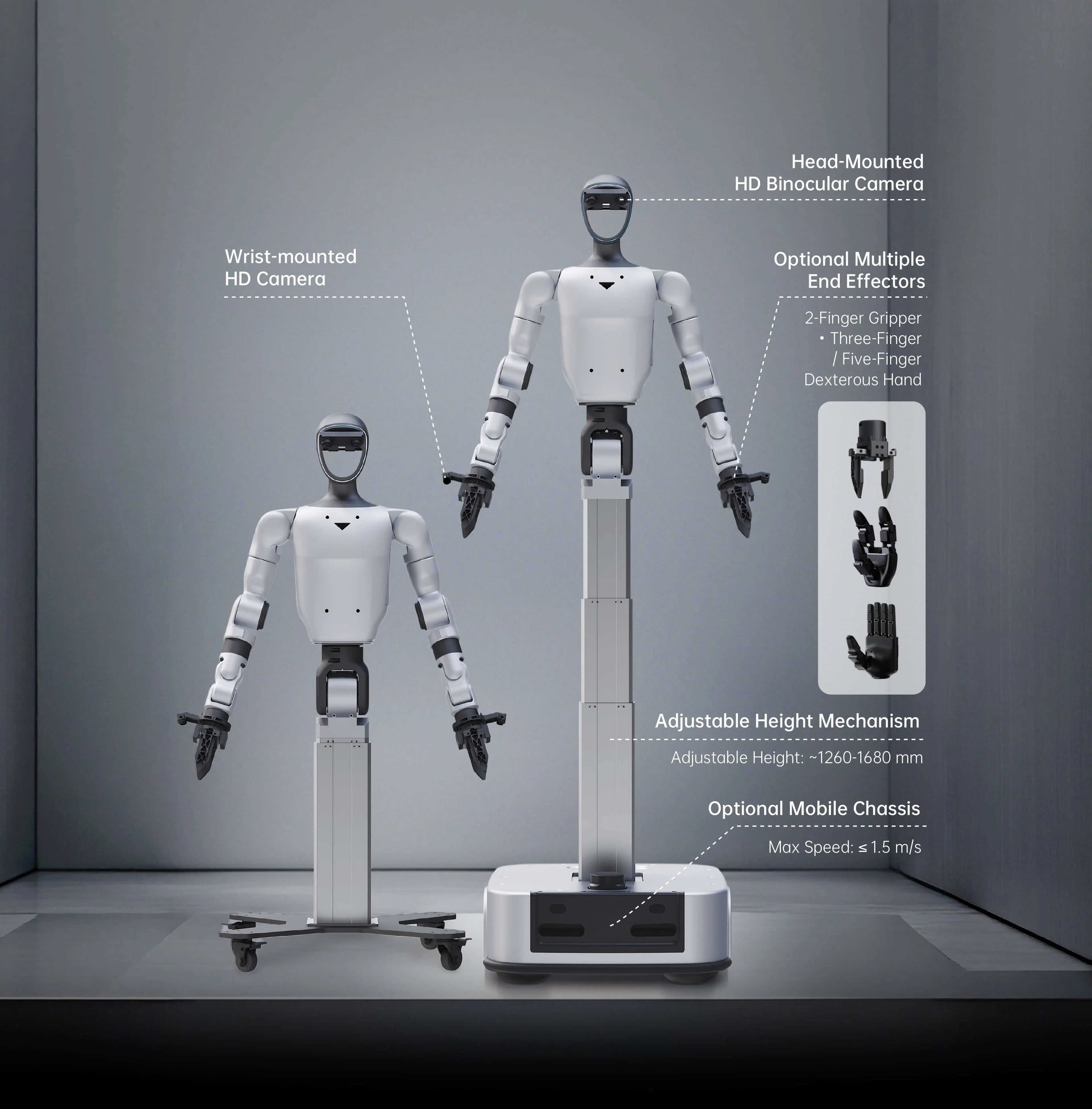
Adopting a mobile lifting design that combines wheels and lifting mechanisms
Vertical Workspace
Waist ROM (Z)
Waist ROM (Y)
Lifting Accuracy
End-Effector Gripper Accuracy
System Teleoperation Latency
Sampling Rate
Provides a unified platform for the entire data pipeline, including data acquisition, processing, labeling, review, and data asset management.
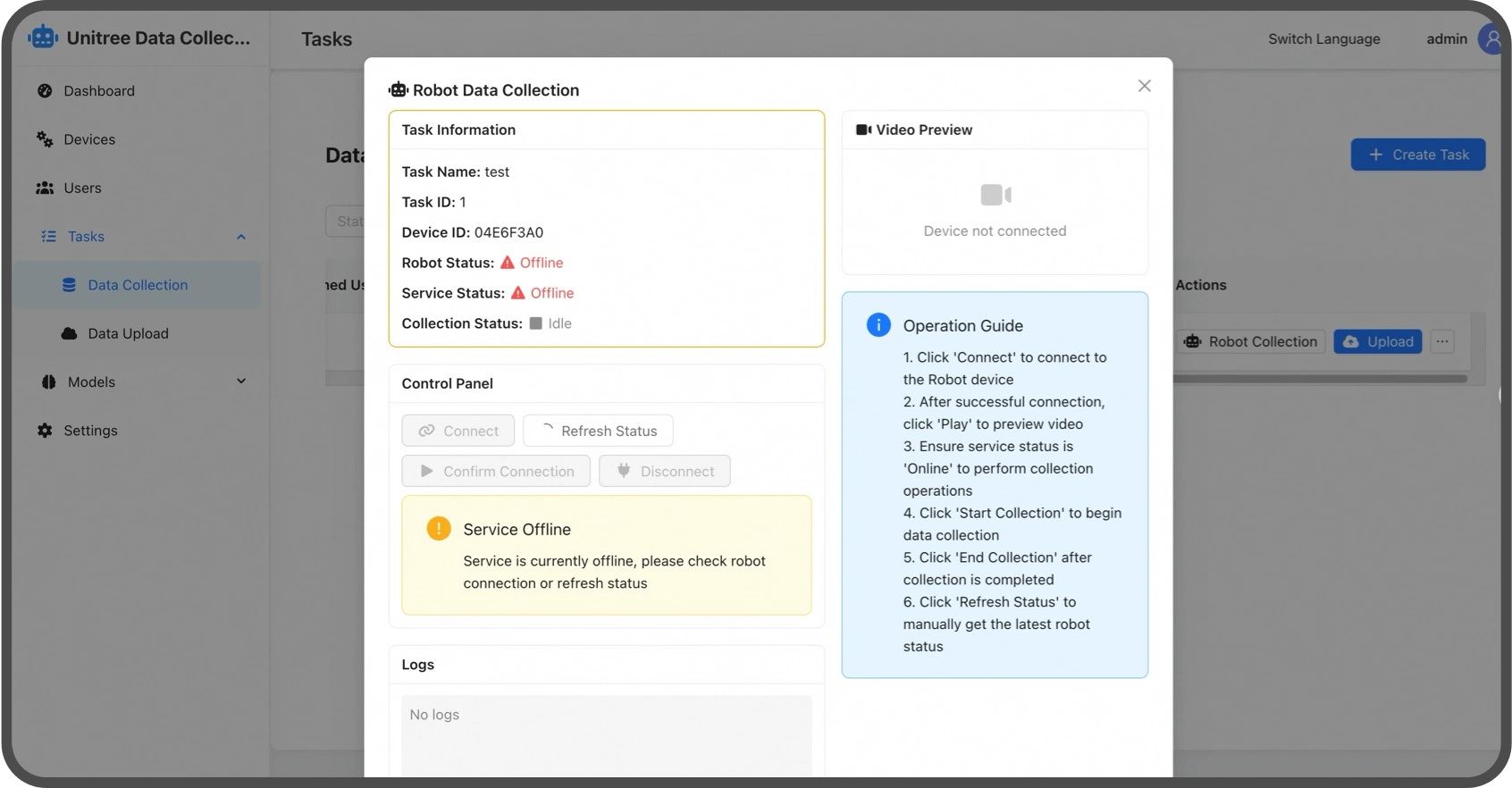
Collect multimodal robot operation data.
Automated cleaning and synchronization.
Efficient annotation tools.
Centralized data asset storage.
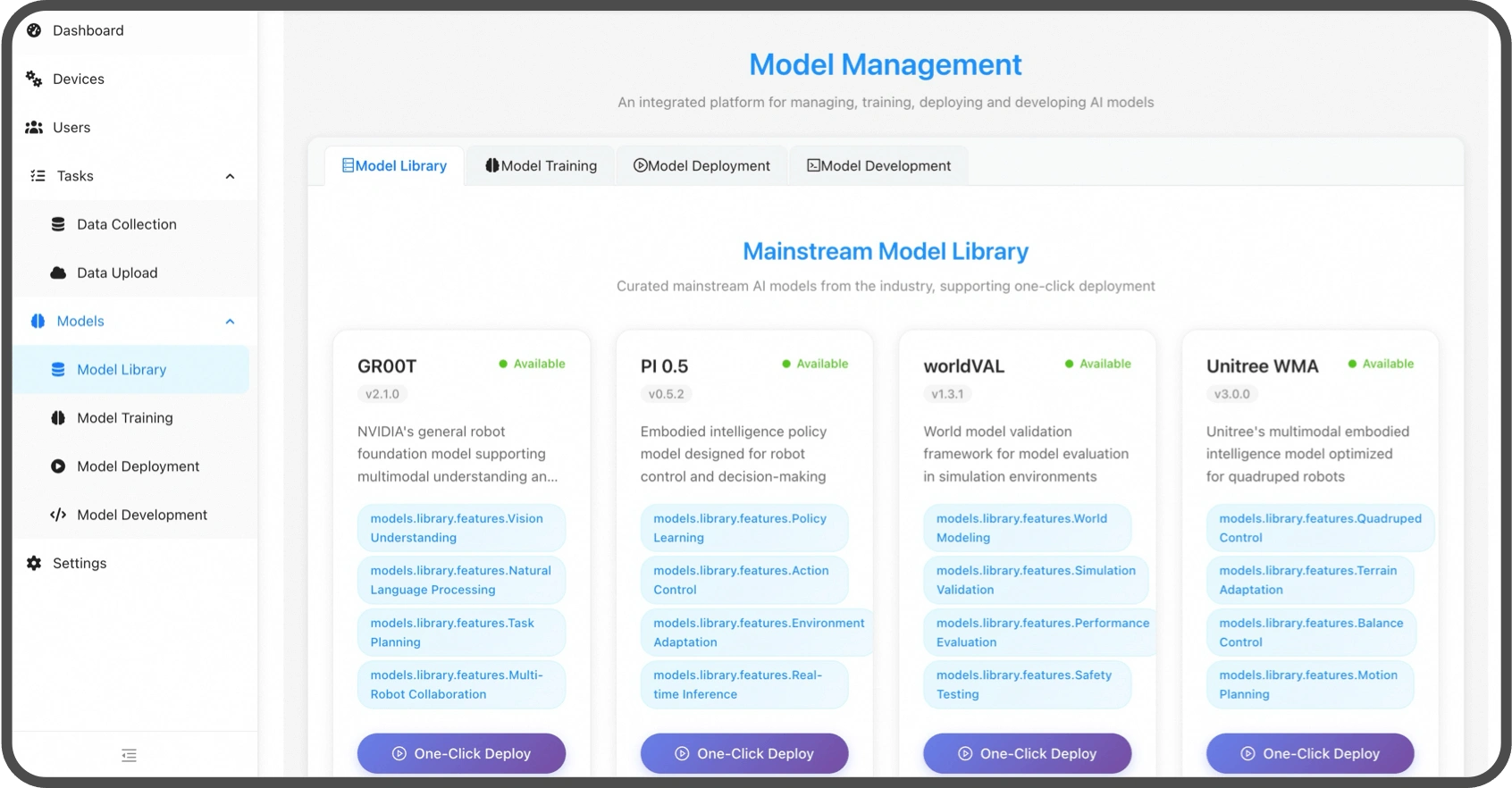
Supports distributed training, custom model development, and efficient inference deployment for humanoid robot applications.
Supports large-scale distributed training workloads.
Enables seamless real-world model deployment.
Compatible with major open-source AI frameworks.




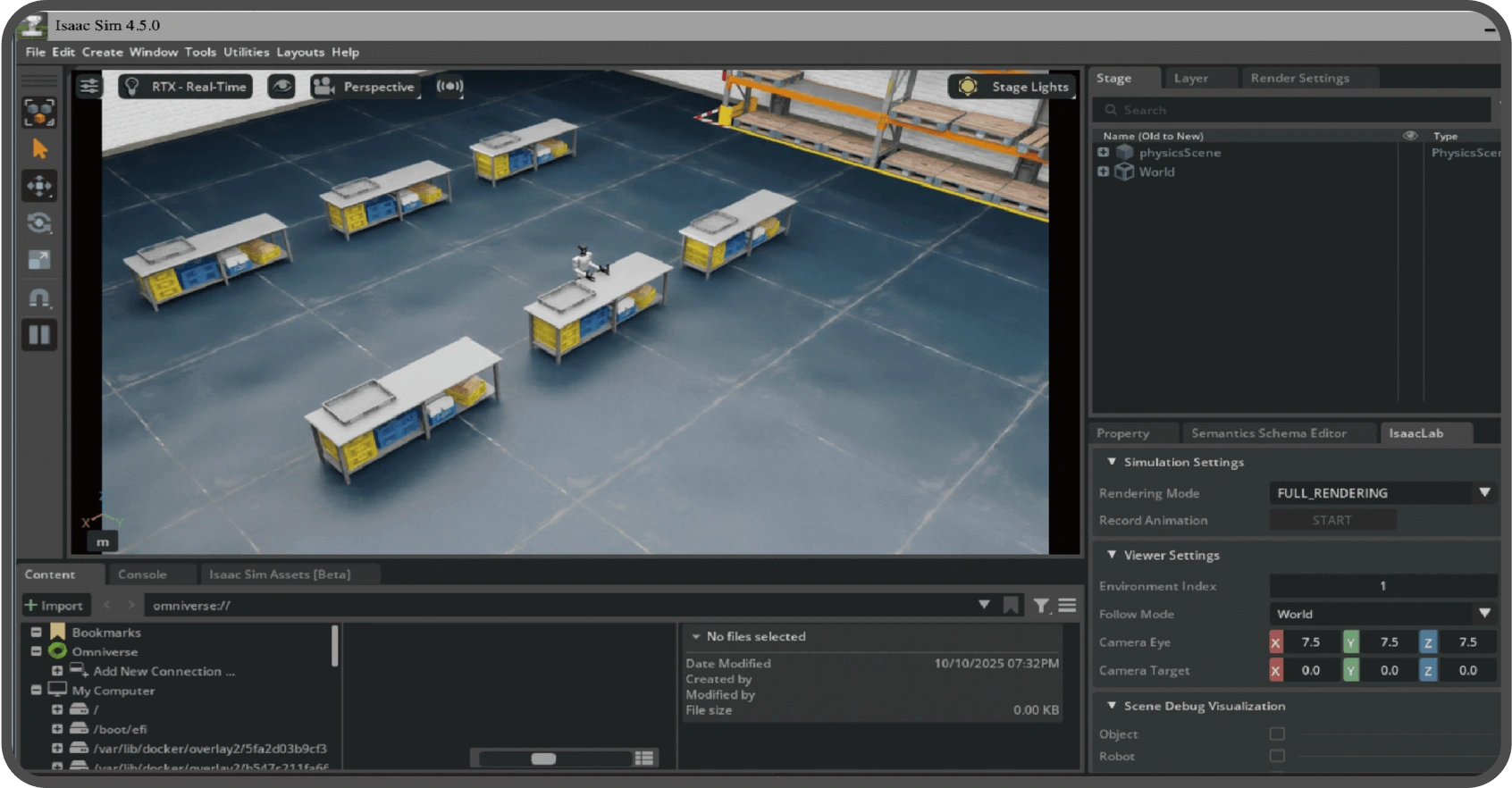
UnifoLM-WMA-0 is Unitree‘s open-source world-model–action architecture spanning multiple types of robotic embodiments, designed specifically for general-purpose robot learning. Its core component is a world-model capable of understanding the physical interactions between robots and the environments.
By analyzing the current environmental state and task objectives, the system accurately predicts future physical interactions between the robot and its surroundings. These predictive insights directly assist the policy module in generating actions, effectively reducing decision errors while optimizing the accuracy and rationality of motion execution.
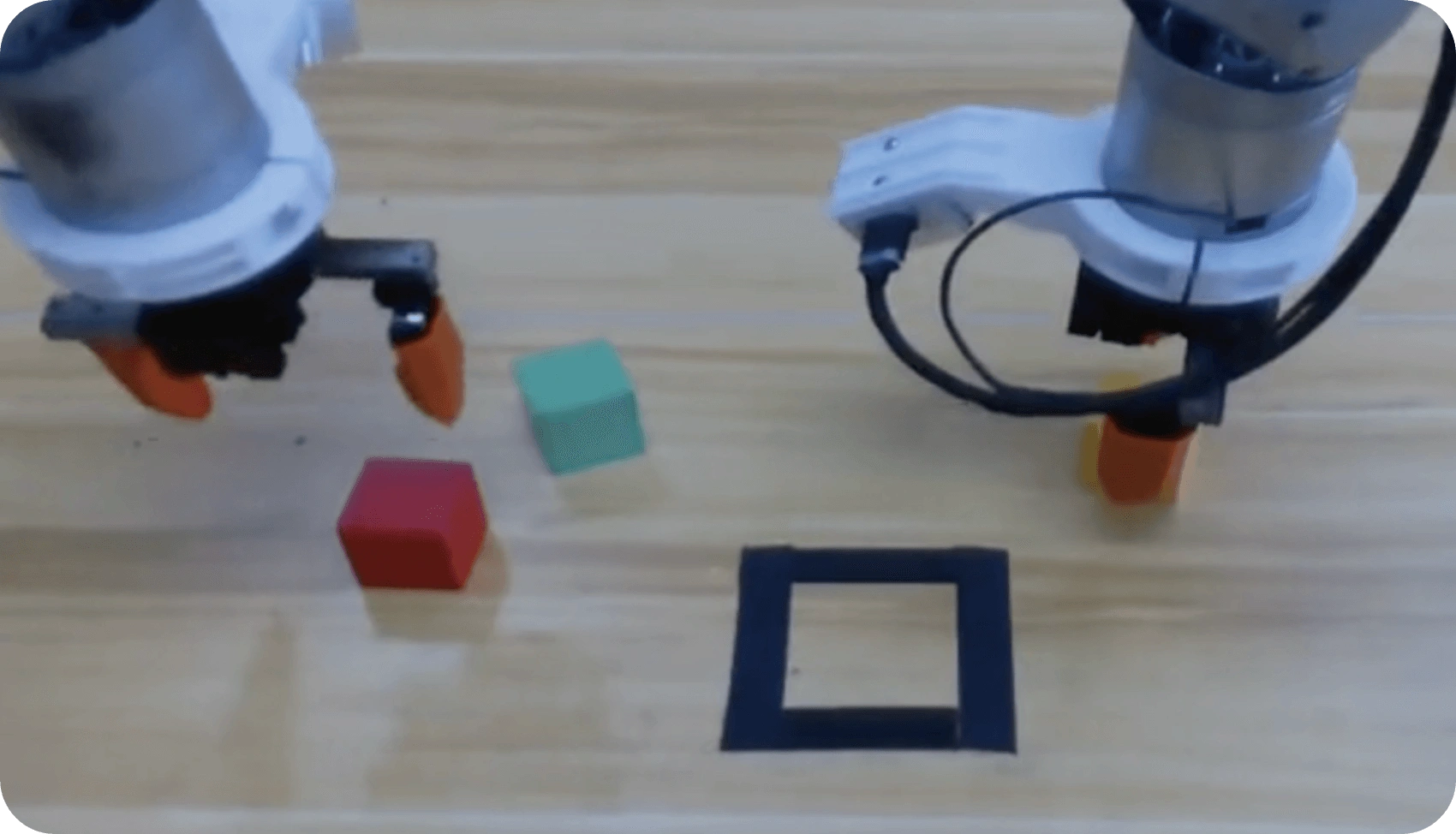
Operates as an interactive simulator capable of generating high-fidelity environmental feedback based on robot motion inputs. By producing high-quality synthetic data, it provides a rich data source for model training and policy optimization, significantly accelerating the learning process.
| Model | G1-D (Standard) | G1-D (Flagship) |
| Overall Dimensions (Min. Column Height) | 1260x500x500mm | 1260x525x570mm |
| Overall Dimensions (Max. Column Height) | 1680x500x500mm | 1680x525x570mm |
| Total Weight (incl. battery) | Approx. 50kg | Approx. 80kg |
| Total DOF (excl. End Effector) | 17 | 19 |
| Single Arm DOF (excl. End Effector) | 7 | 7 |
| Max. Single Arm Payload【1】 | Approx. 3kg | Approx. 3kg |
| End Effector Options【2】 | Optional 2-Finger Gripper / 3-Finger Dexterous Hand (No Tactile) / 3-Finger Dexterous Hand (With Tactile) / 5-Finger Dexterous Hand | Optional 2-Finger Gripper / 3-Finger Dexterous Hand (No Tactile) / 3-Finger Dexterous Hand (With Tactile) / 5-Finger Dexterous Hand |
| Waist DOF | 2 | 2 |
| Waist Joint Range of Motion | Z-axis: ±155°, Y-axis: -2.5° to +135° | Z-axis: ±155°, Y-axis: -2.5° to +135° |
| Column Lifting Speed | Approx. 60mm/s | Approx. 60mm/s |
| Maximum Mobility Speed | / | 1.5m/s |
| Chassis Drive Type | / | Diferential drive, supports 360° in-place rotation |
| Chassis Sensors | / | LiDAR *1 + Depth Camera *2 + Physical Collision Sensor *2 + Low-Obstacle Detection Sensor *2 |
| Basic Computing Power | 8-core High-performance CPU | 8-core High-performance CPU |
| Perception Sensors | Head HD Binocular Camera *1 + Wrist HD Camera *2 | Head HD Binocular Camera *1 + Wrist HD Camera *2 |
| Wi-Fi 6, Bluetooth 5.2 | Yes | Yes |
| High Computing Power Module | NVIDIA Jetson Orin NX 16GB (100TOPS) | NVIDIA Jetson Orin NX 16GB (100TOPS) |
| Battery | Upper Body Battery(Quick-release): 9Ah | Chassis Battery (Built-in): 30Ah |
| Manual Controller | Yes | Yes |
| Visualization Computer | Yes | Yes |
| Battery Life | Approx. 2 hours | Approx. 6 hours |
| Upgraded Intelligent OTA | Yes | Yes |
| Secondary Development【3】 | Yes | Yes |
[1] The maximum load of the arm varies greatly under different arm extension postures.
[2] For end-effector selection, please contact our sales team.
[3] For more information, please read the secondary development manual.
[4] The above parameters may vary in different scenarios and configurations, please subject to actual situation.
[5] The humanoid robot has a complex structure and extremely powerful power. Users are asked to keep a sufficient safe distance between the humanoid robot and people.Please use with caution
[6] The product appearance is subject to change. Please refer to the final product.
[7] Some sample functions on this page are still being developed and tested, and will be opened to users in the future.
| Manufacturer | Unitree |
|---|


