Currency
|
As low as £2,288.50 £1,907.08
Meet LIMO, a mobile robot designed around the AgileX mobile platform. This scalable robotic structure is dedicated to AI development. Thanks to its ROS and Gazebo compatibility, you can transform a simple off-road platform into a 100% autonomous explorer and mapping robot!
LIMO Mobile Robot: 3 Available Versions
The LIMO robotic platform comes in 3 versions: a standard, pro, and ROS2
PRICE MATCH GUARANTEE
We guarantee the best price in the market. If you find a better offer, let us know and we will beat it!
More information: Terms & Conditions

LIMO mobile robot: everything you need for AI navigation
The LIMO mobile robot offers a scalable structure and is fully ROS compatible, ideal for working on applications requiring autonomous navigation. This mobile robot is perfect for students (in robotics engineering, electrical engineering, industrial computing, etc.) and for robotics challenges (like the RoboCup).

It consists of an AgileX mobile platform with interchangeable wheels. You can switch from tracked to 4-wheel omni-directional or differential driving.
LIMO Mobile Robot: 3 Available Versions
The LIMO robotic platform comes in 3 versions: a standard, pro, and ROS2
LIMO Mobile Robot: Standard Version
The basic version of the LIMO mobile robot includes an Nvidia Jetson Nano, an EAI X2L LiDAR, and an Orbbec DaBai depth camera.


LIMO PRO: Robotic Platform for Immersive Learning
The LIMO PRO mobile robot integrates the NVIDIA Orin Nano, an EAI T-mini Pro LiDAR, and the Orbbec Dabai depth camera. These various sensors give the robot a robust perception of its environment. It is ideal for developing applications for autonomous navigation, obstacle avoidance, and visual recognition.
LIMO PRO is an ideal robotic platform for students and researchers. Its numerous sensors and advanced software facilitate immersive learning.
LIMO PRO is compatible with ROS 1 Noetic and ROS 2 Foxy for flexible software integration. Its battery provides up to 2.5 hours of continuous use.
LIMO ROS 2: The Power of Intel NCU i7
The LIMO ROS 2 mobile robot is equipped with an Intel NCU i7 processor, allowing it to run ROS 2 on Ubuntu 22.04. This version is ideal for research and education in the field of autonomous mobile robots.
LIMO ROS 2 enables exploration of the latest capabilities of ROS 2, including key open-source frameworks such as Navigation2 for mobile robot navigation and MoveIt2 for advanced robotic arm motion planning.
LIMO ROS 2 has a long-lasting battery life of 2.5 hours. It is available with ROS 2 only (not with ROS 1).

What You Can Do With LIMO?
The portable LIMO is an incredibly versatile and multifunctional robotic platform for beginners as well as advanced programmers. It uses the modular programming languages ROS 1 or ROS 2 to achieve many functional purposes including Simultaneous Localization and Mapping(SLAM), autonomous path planning and navigation, obstacle avoidance, and object detection for all AI robots and unmanned driving applications.

Simultaneous Localization and Mapping

Obstacle Detection and Avoidance

V-SLAM
Four Steering Modes
Four steering modes make LIMO substantially superior to other robots in its class. The available modes are: Omni Wheel Steering, Tracked Steering, Four-Wheel Differential Steering and Ackermann Steering. Switching between modes can be completed in just 3 mins and they can meet the requirements for different environments including indoor and outdoor scenarios.

Omni Wheel Steering Mode can realize translation and rotation in place in any direction, including straight, oblique, horizontal, S-shaped travel, zero-radius rotation, narrow and irregular spaces at any angle, etc.

Four-wheel Differential Steering Mode can tackle all complex terrain. Driving on any surface from smooth concrete to sandy roads is possible.

Ackermann Steering Mode is highly similar to automobile steering which turns the inner and outer wheels at the appropriate angles for more stable steering. This system is customizable based on the steering speed.

Tracked Steering Mode uses a large contact with the ground and adjusts steering speeds of the left and right sides for multiple surfaces such as smooth roads, sandy and rugged roads, slopes, etc.

Tracked Steering Mode

How to switch to Ackermann Steering Mode from Omni Wheel Steering Mode? Simply pull up the red button.
Open-source Software For More Possibilities
LIMO can be fully customized according to one’s needs. Other pieces of hardware can be attached to the ports to meet whatever requirements are necessary. Programming Demo, ROS Packages and Simulation powered by Gazebo are supported as well.

LIMO is suitable for beginners just learning robotics or advanced users and is a great tool for educational purposes, such as STEM.

Many fields can be applicable, such as AI Geek, Robot Challenge, Autonomous Driving Research, Robot Refit and Robot Development.

Equipped with <360° Scanning LiDAR, RealSense infrared camera and touch screen display, LIMO has a higher performance sensor configuration built in.
360º Scanning LIDAR
It allows LIMO to do mapping, navigation and avoid any obstacles while moving.

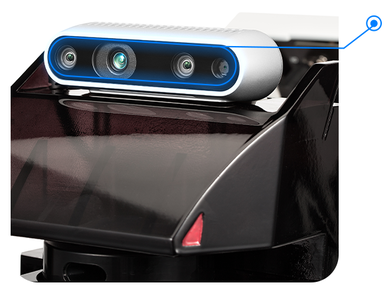
Intel Camera D435
This depth camera helps LIMO accuractely measure its distance from objects. What's more, the Real-Sense infrared camera allows LIMO to be able to work in the dark.
7-Inch Touch Screen Display
It allows you to set up and control LIMO easily and intuitively at your fingertips.

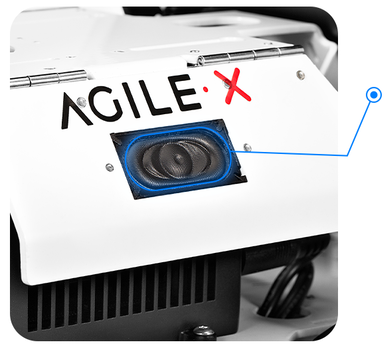
Voice Module
The voice module comes with a built-in microphone and speaker, which enables LIMO to recognize letters, numbers, and automatic voice reading broadcasts.
With these incredible features, LIMO can achieve precise self-localization, SLAM & V-SLAM mapping, route planning and autonomous obstacle avoidance, reverse parking, traffic light recognition, and more.
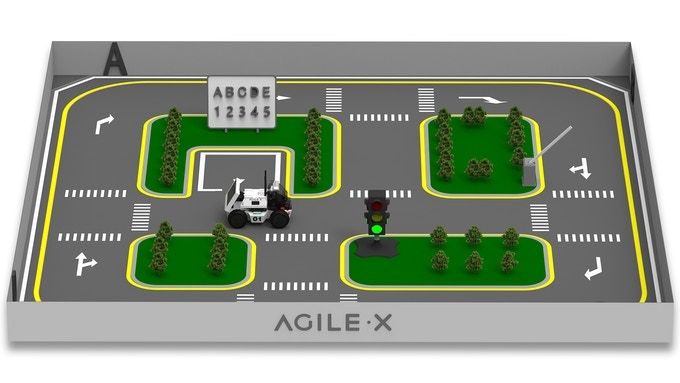
Specially-Designed Simulation Table
LIMO comes with a specially designed simulation table. It’s fun and convenient, the simulation table can help you quickly simulate and test the developing functions in the most realistic scenario possible.
Why is the simulation table needed?
Beginner friendly, perfect for teaching demonstrations and testing
Perfect for developing new functions such as obstacle recognition, positioning and navigation
Easy to assemble, it only takes 15 minutes to install or disassemble
With the simulation table, LIMO can develop and demonstrate multiple functions: traffic lights recognition, reverse stall parking, flexible turning, and climbing gentle slopes.


| Manufacturer | AgileX |
|---|---|
| RWP_Maximum Translational Velocity | 1m/s |
| RWP_Maximum Payload | 5kg |
| RWP_Climbing Ability | 25º |
| RWP_Operating Time | About 40min |
| RWP_Charging Time | About 2 hours |
| RWP_Standby time | About 2 hours |
| RWP_Working temperature | -10~+40ºC |
| Dimensions | 322x215x247mm |
| Product Weight | 4.8kg |
| RWP_Chassis Material | Powder-coated aluminum plate, 2mm thick;Plastic |
| RWP_SBC | Nvidia jetson Nano 4G |
| RWP_CPU | ARM 64Quad [email protected] (Cortex-A57) |
| RWP_GPU | 128core NVIDIA Maxwell @921MHz |
| RWP_Lidar | EAI Lidar X2L |
| RWP_Camera | Orbbec Dabai |
| RWP_IMU | Hi226 |
| RWP_Motors | C602 |
| RWP_Encoders | Motor Embedded Encoder |
| RWP_Voice Module | IFLYTEK Voice Assistant / Google Assistant |
| RWP_Screen | 7 inch 1024x600 TouchScreen |
| RWP_Battery | 5200mAh 12V |
| RWP_Wheels | Off-road wheel x4, Mecanum wheel x4, track x2 |
| RWP_Connectivity | Wifi / Bluetooth / UART / LAN |
| RWP_Open Source ROS (compatibility) | ROS1 |
| RWP_System | Ubuntu 18.04 |




